研究活動等・Research Information
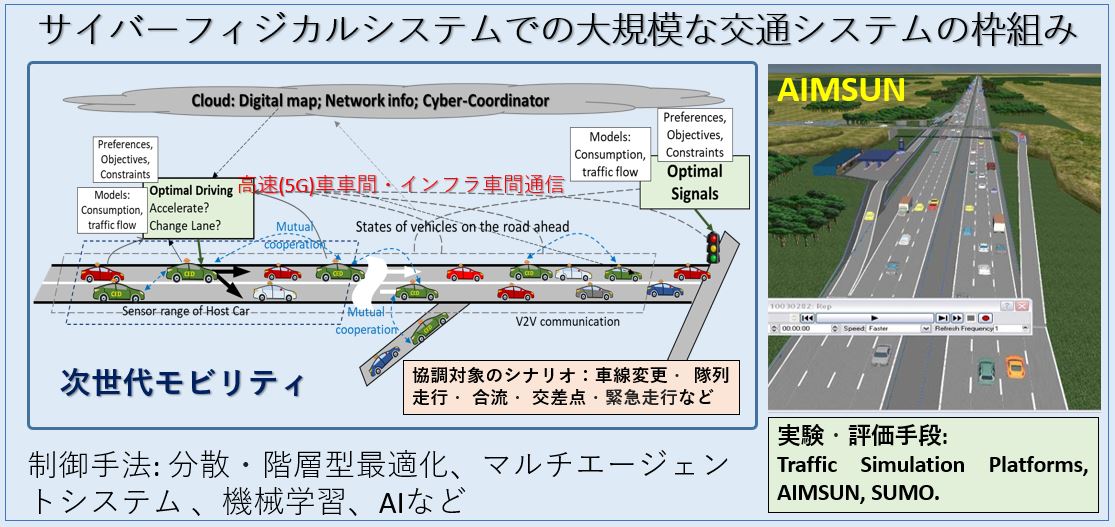
研究概要: 従来型の車両交通システムは、 渋滞、 事故、 エネルギー消費、 排気ガス放出を十分に抑制することができず、 我々の社会に大きな負担を強いています。 特に人間の認知決定能力の限界で起きる無分別な運転は余分なエネルギー消費につながり、 またさらに渋滞や事故を引き起こします。交通渋滞は合流ゾーンもしくは車線変更が頻発する道路区間において度々発生します。 既存の半自動化車両の運転技術は、 交通状態、 エンジン特性、 信号機、 道路地形の情報に基づいて、 単一の車両を独立的に運行させます。 このようなスタンドアロン型の(車間の連携が実施されない) 運転技術は現存する従来型交通システムを対象としており、 スマート交通システムの来るべきシナリオにおいては、 円滑な交通流を実現することができません。 現在、高速通信技術、 スマート機器、 自動化車両の導入により、 道路交通システムのパラダイムがシフトしています。 道路交通情報を高い精度で収集することが可能になり、車間通信やインフラ通信を用いることで、 交通環境全域が連携され、 各車が隣接する車両や環境の情報を入手できるようになります。 当研究室では、このような背景のもとで、統合化された車両交通制御策の構築により、 円滑な交通流を担保し、 道路ネットワークにおけるエネルギー消費を大幅に削減の実現に向けて研究開発を進めています。 図1は、次世代交通制御システムにおける各制御則の連携の例を示しています。
-
省燃費運転システム・Eco-Driving
-
Smart City for Future Society
-
次世代信号機制御と車両速度制御
-
分散型協調制御により交通全体の円滑・効率化
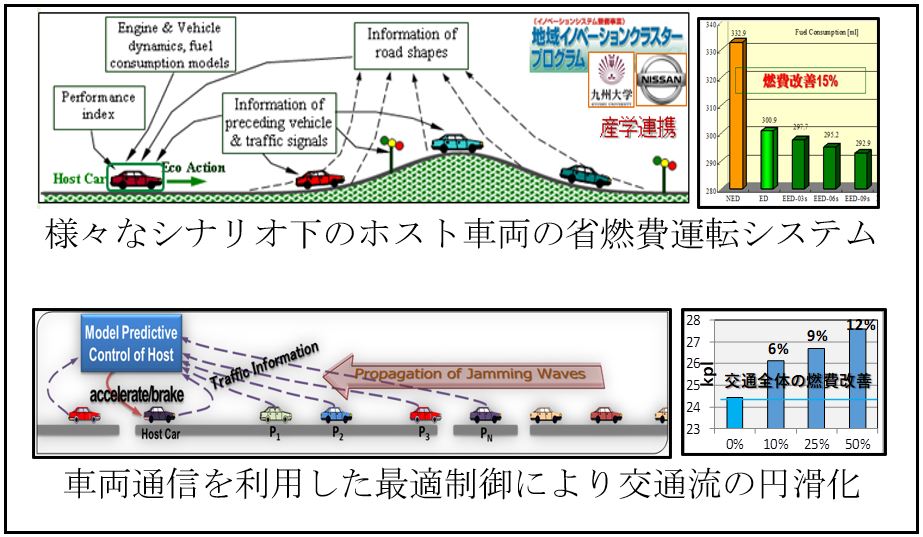
省燃費運転システム・Eco-Driving: 本研究では自動車が消費する燃費を最小化するように、
実時間で計算できる最適運転制御(Eco-Driving)手法を開発しました。産学連携のこの研究には、
道路形状、交通状態、信号機情報などを利用した走行制御系を設計し、制御則には、モデル予測制御を用いることで、
交通信号機の情報や先行車両の動きを予測しながら最適な制御入力を計算します。
実験車両の運転データを使用した車の追従モデルを作成し、エンジン性能図を使用して燃料消費モデルを開発しました。
このモデルは、国際的に評価されていて、欧米の大学や研究機関で使用されています。
図1に示すように、提案した運転システムを使用した車両燃費が15%まで向上しました。
今後は、車車間通信情報を使用して、協調型制御システム開発研究を継続し、安全安心で効率的な自動運転技術の開発を目指します。
Using the fast real time optimization technique,
model predictive controller is designed to contol a host vehicle using predicted information of the preceding
vehicles, road grades, and traffic signals for optimizing fuel efficiency.
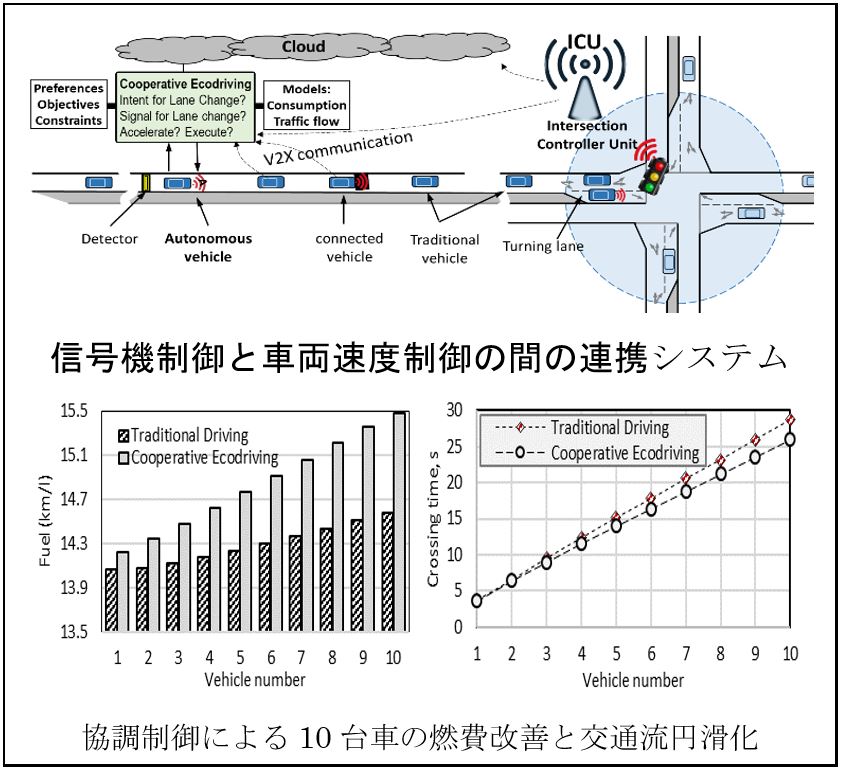
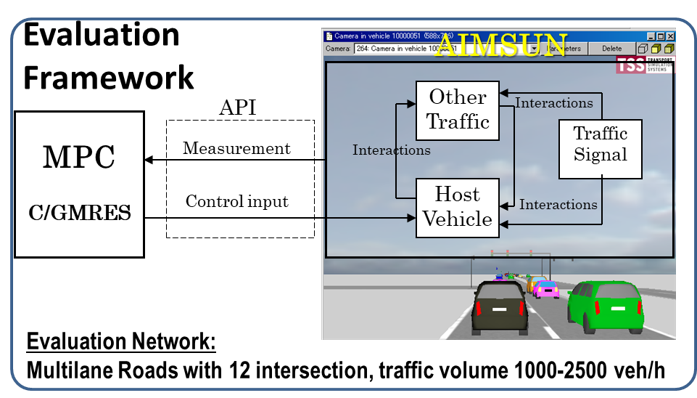
概要・Outline道路ネットワークにある交差点の信号を制御し、渋滞緩和・交通流のが円滑化する手法を開発しています。 信号最適化問題は、従来のモデル予測制御を適用しても解けないため、新しく(連続時間系と離散時間系を融合した) ハイブリッド型モデル予測制御手法を開発しました。信号制御、合流や交通流のを評価するため、 図3に示したような交通シミュレーターを開発しました。図4には次世代信号機制御と車両速度制御連携の枠組みと 簡単なシミュレーション結果を示します。未来の信号情報を使用した車両の最適運転で交差点の通過時間の短縮や燃費改善できることを 確認しました。また、信号がない交差点であったとしても、全自動車両が円滑に通れるような方法を開発しました.